8
章
| 第8章 「ふげん」における運転・保守技術の高度化 |
第 8 章 |
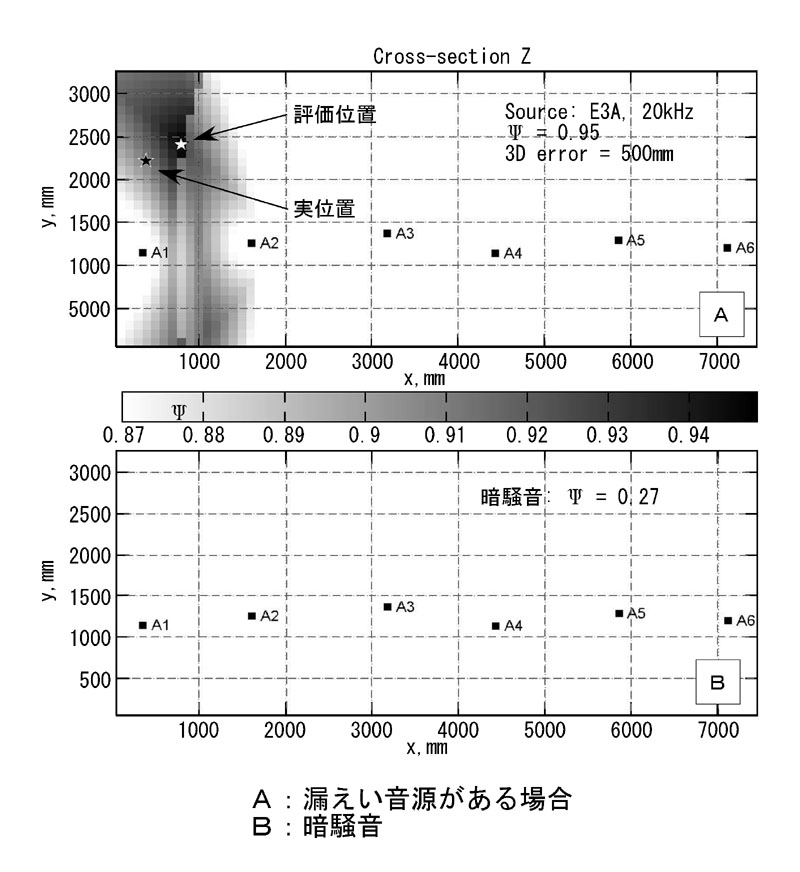
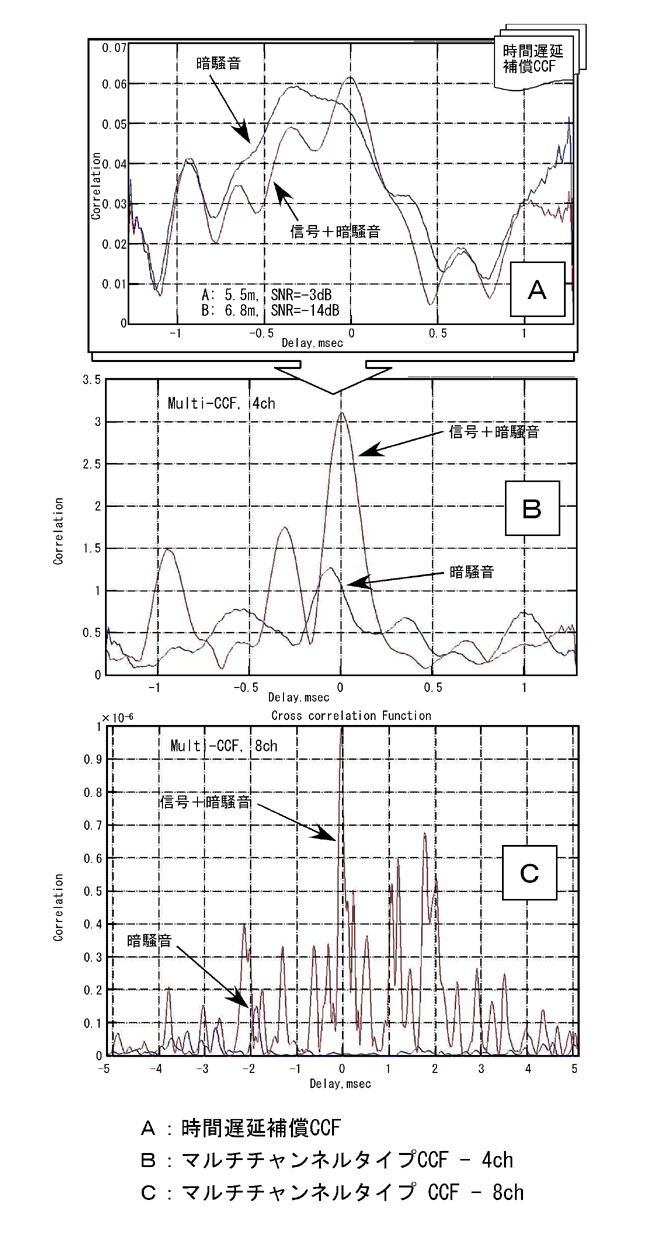
| この手法は、理論的に前述のSPL手法に比べて正確であるが、信号歪みは、TDOA変動という結果をもたらし、その精度は500-900mmまで低下する。それにも拘らず、漏えいTDOAデータは、漏えい空間点に一致すると考えられる。背景騒音は、分散タイプのノイズであるため、背景騒音に関連するCCFは、ランダムにピークを分散し、その結果、誤差の値であるΨijkは、大きくなるはずである。 位置検出アルゴリズムは、検出パラメータとして選定された位置測定ファクター:Ψによる差を利用する。Ψは、(Ψthr−Ψijk)/Ψthrに比例しており、Ψthrは、測定された最大のΨijkであるとすることができ、Ψは、0〜1に値を維持される。処理時間は、領域3について約3分である。 図8.6.10は、位置測定ファクターにより、漏えいの存在が簡易的に検出されることを示している。位置測定ファクターは、図8.6.10のAに示すように音源で0.95、図8.6.10のBに示すように背景騒音について0.27であると評価される。このアルゴリズムの信頼性は、背景騒音の小さいボックス内に位置するN組のマイクロフォンペアのデータを、使用しているためにより高くなっている。 (3)マルチチャンネル相関検出手法(Multi-channel Correlation Method)
|
マルチチャンネル相関検出手法は、種々のマイクロフォンに関連する時間遅延補償型CCFの重ね合わせとして提案されている。 位置検出手法は、2チャンネルアルゴリズムを前提としているため、チャンネル数を増加することにより、マルチチャンネルを一般化することができる。そのようなマルチチャンネル関数は、すべての遅延
|
| 428 | ||