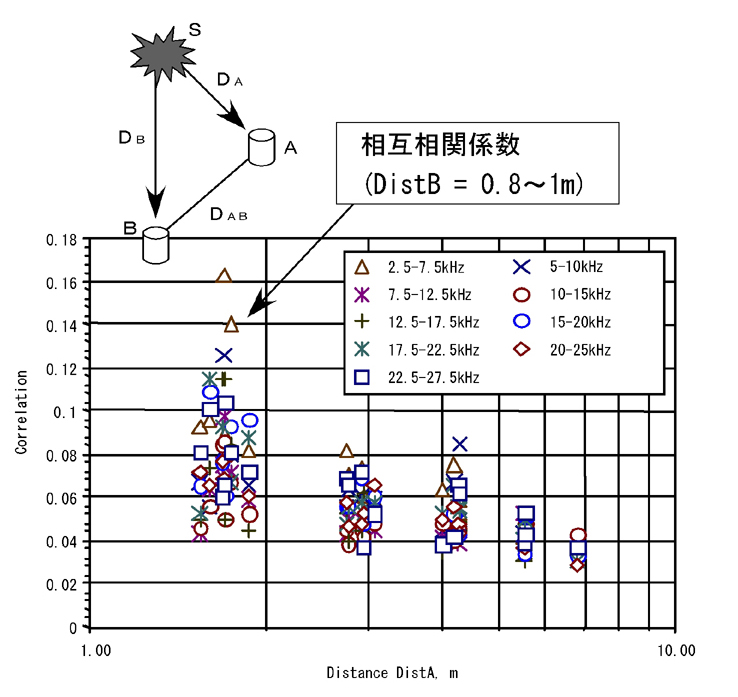
 図8.6.8 ボックス内におけるセンサーと
図8.6.8 ボックス内におけるセンサーと
音源の相互関係及び相対位置
は、図8.6.7のCに示すように背景騒音中に移行すると、更に状態は悪化するという欠点を持っている。
(1)相互相関検出方法(Cross-Correlation Analysis Method)
音源とマイクロフォン間の距離が増えるにつれ、CCFの低下が進むことが、図8.6.8に示されている。CCFを表す式を以下に示す。SNRは、式(5)から分かるように、背景騒音により影響を受ける。また、式(5)の優れた追従性は、ボックス内の相互相関ファクターの実測データから分かる。

ρSaSb:背景騒音がない状態での相関レベル
ρNaNb:背景騒音の相関レベル
SNRA/B:チャンネルA/BにおけるSNR比
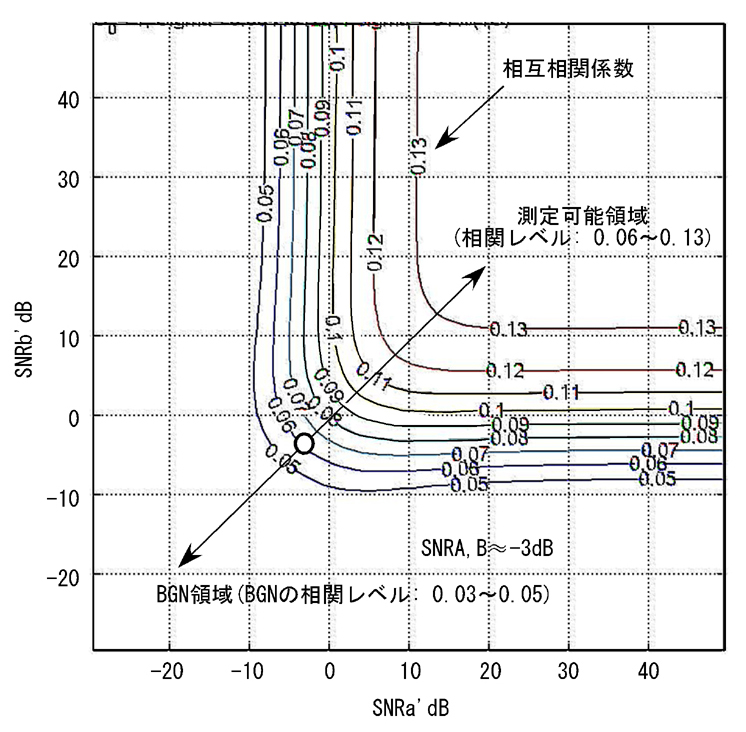
0.2gpmの漏えいは、これらのファクターの解析から、CCF値の増加により、検出できることが分かる。しかし、低い相関であるため、最大背景騒音レベルが観測されるボックス内において、検出感度は非常に低下し、漏えいの検出は、特定の領域(SNR(≧-3dB:図8.6.9参照、バックグラウンド相関レベルが約0.03〜0.05)のみで可能となる。
|
|
 図8.6.9 ボックス内におけるチャンネルA及びBのSNRにおける相互相関関数の解析結果
図8.6.9 ボックス内におけるチャンネルA及びBのSNRにおける相互相関関数の解析結果
音波拡散が相対的に強いボックス内部のような限られた空間内においては、精度の高い音源の特定が難しいことが分かる。そのような状況の下においては、音源は点ではなく、空間分布のように表され、漏えい検出が難しい状態となる。
(2)位置検出手法(Location-based Detection Method)
位置検出手法は、CCFから導出されるTDOAデータ解析に基づいた位置測定手法を用いている。
音源位置は、3次元空間における点ijkとして評価される。すなわち、エラー基準であるΨijkを最小にする位置が音源ということになる。この式において、τnは、n番目のマイクロフォンペアの組み合わせによるマイクロフォンからの信号のCCFから直接導出される。
TDOA値は、任意の空間位置Pijkの座標及びn組目のマイクロフォンペアの2つのマイクロフォンの座標であるmabnにより決定される。

N:マイクロフォンペアの総数
Pijk:空間座標ijk
mabn:n組目のマイクロフォンペアの座標
|