8
章
| 第8章 「ふげん」における運転・保守技術の高度化 |
第 8 章 |
| 0.5dB以内に抑えることが可能である。つまり、判定精度における最小検出レベルは、背景騒音レベル+0.5dBまで低下させることができる。変化が発生した瞬間は、図8.6.6のAに示すように決定されるが、0.5dBよりも低い最小検出レベルにおいては、図8.6.6のBに示すように検出精度を低下させることとなる。 オフラインデータ処理においては、30分間の信号に対して、処理時間は0.5〜1.0分/チャンネルと評価された。しかしながら、プロセスデータブロック長さは、5分であり、かつアルゴリズムは、並列オンラインプロセスに適合しているため、全検出時間を、5分以内に短縮することが可能である。 8.6.5 定常音波に対する新漏えい検出手法 一般的な漏えい検出手法による検出可能レンジは、主にボックス内の音響伝搬状態によって非常に低くなる。実際、音響減衰が非常に大きい(β=1の場合:約10dB/m)ため、漏えい音響出力レベルをPWL=90dBとすると、信号は、想定漏えい箇所から9mの距離において、ほとんどなくなってしまう。実際には、測定チャンネルの内部電気ノイズ(約25dB)のため、測定可能レンジは、6〜7mに制限される。 さらに、背景騒音 の存在及びしきい値検出手法の適用状態(SNR>0dB)によって、測定可能領域の制限は、3〜5mとなる。それに反して、相関分析検出手法は、たとえSNR<0dBであるとしても、適用可能である。 相互相関関数(Cross-Correlation Function:CCF)は、2チャンネルアルゴリズムとして取り扱われる。2チャンネルアルゴリズムは、2信号間における時間差を評価する手法である。音源から放出される信号は、理想状態において、同じ信号として取り扱うことができる。ピークが明確な信号である場合、時間軸のCCFピーク位置は、図8.6.7のAに示すように、2つの信号が到着する時間差に一致する。 もし、ノイズの振幅が、理想音源からの信号の振幅より大きいとしても、その性質のために、CCFはノイズに影響されにくいと考えられる。さらに、CCFに基づいた信号の到着時間差(Time-Differences-Of-Arrival:TDOA)解析は、音源位置を決定するために有効である。 ただし、障害物による多数の反射及び拡散による伝達において、音響信号が歪められた場合、信号間 |
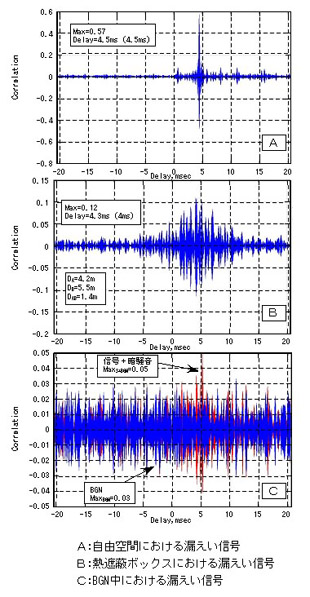 図8.6.7 相互相関関数の解析結果 の線形関係、すなわち相関は小さくなると考えられる。特に、相関アルゴリズムの性能は、配管上の音波拡散及びボックス内の複雑形状により影響される。自由空間(図8.6.7のA)及び原子炉停止状態(図8.6.7のB)におけるボックス内のCCF測定例を図8.6.7に示す。背景騒音がない状態においては、相互相関ピークは、図8.6.7のAの自由空間の場合に比べて低く、その形状は非常に広く、かつ、そのピーク位置は、明確に決めることができない。漏えい信号 |
| 426 | ||