8
章
| 第8章 「ふげん」における運転・保守技術の高度化 |
第 8 章 |
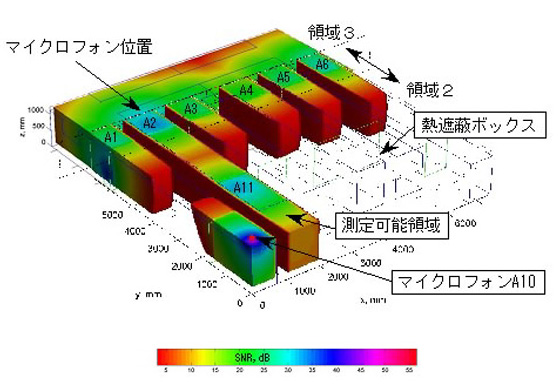 図8.6.4 ボックス内の領域2及び3におけるSNR分布 |
| である漏えい箇所周辺の範囲である。平均背景騒音レベル、評価済みの音響伝搬減衰係数及び図8.6.3のBに示す最大シグナル/ノイズ比(Signal/Noise Ratio :SNR)での周波数が16〜20kHzにおける漏えいPWLに基づく、仮想漏えいが0.2gpmの測定可能範囲は、図8.6.3のAに示すように約3.5〜5mまでと評価された。 任意の漏えいPWL及び減衰定数βの測定領域内における全空間要素(100×100×100mmサイズの立方体)については、(2)式より算出された減衰漏えい信号のSPLと背景騒音レベルの要素との比較を行い、これに基づいた3次元のSNR図を用いることにより、より詳細な解析を実施した。音響伝搬状態の相違に基づき、測定領域は領域1、2及び3(図8.6.1のC参照)に区分される。 この手法は、背景騒音の空間分布、マイクロフォンの相対位置、指向性及び配管サポートにおける音圧ロスを考慮している。3次元のSNR(図8.6.4)は、測定可能領域を視覚的な画像により表示することができる。SNR図(図8.6.4)は、領域3の全領域において、0.2gpmの漏えいが測定可能であることを示している。一方、領域2における0.2gpmの漏えい検知可能領域は、配管サポートにおける音圧ロス及び大きな減衰のため、全モニタリング領域の約50%の範囲である。領域2の全領域において、0.2gpmの漏えい検知を可能とする最も簡単な方法は、マイクロフォンをボックス内に追加設置することであるが、多くの追加マイクロフォンの設置が、必ずしもコストダウンにならないほか、場所によっては、ボックス |
及び配管への接近が制限され、設置工事や保守の面において困難な問題が生じる可能性がある。 そのため、より感度の高いアルゴリズムの適用が必要となる。 (2)位置検出手法(Location-based Detection Method) 漏えい位置検知アルゴリズムは、モニタリング領域内における、マイクロフォン間の音圧の相対減衰解析に基づいている。モニタリング領域は、位置座標xyzをijkで表した空間要素セットに分割される。もし、漏えい位置が、ijk位置のように特定されると、各マイクロフォンにより測定されるSPL値から推定される漏えい位置ijkのPWL値は、実際の漏えい位置と一致するはずである。そのPWL値は、音源とマイクロフォン間の距離に基づいた式(2)により評価される。仮想漏えい位置ijkが実際の漏えい箇所に一致するかどうかは分からないため、式(4)によって、全マイクロフォンについて解析された平均PWLを予測PWL値とする。そのとき、各マイクロフォンで測定された音圧レベルからの予測PWLと、平均PWL間の差の積分差δijk値は、式(3)(Mは解析におけるマイクロフォンの合計数)により評価される。位置ijkが、真の漏えい箇所に近づくと、この差δijkは0まで減少することとなる。変数δijkが最小になる空間ポイントijkは、漏えいの可能性がある位置であると想定することができる。 試験結果及び数値評価の結果(図8.6.5)から、本手法は、通常原子炉運転状態における0.2gpmの漏えいに対して、約300〜600mmの空間誤差を持つこと |
| 424 | ||