| 第8章 「ふげん」における運転・保守技術の高度化 |
第 8 章 |
|
CAn=∫CAn(x)xdx/∫CAn(x)dx (n=l−3)
これらの3つの推論結果は、下式により加重平均され、LFCVの制御信号CAを出力する。 CA=m1・CA1 + m2・CA2 + m3・CA3 ここで、m1、m2及びm3は、それぞれ推論部(1)から(3)に対する重みゲインである。これらの重みゲインの値は、動特性解析コードによるシミュレーション並びに実際のプラントでのパラメータ調整により、最適な応答となる値を選択することにより設定した2)。 (4)「ふげん」制御系への導入 ファジィ制御システムを「ふげん」の制御系に導入する場合、蒸気ドラム(すなわち、原子炉)に冷却水を供給するという、重要な弁LFCVを直接自動制御するため、慎重に検討を進める必要があった。すなわち、動特性解析コードを用いたシミュレーションによる制御特性と実機での特性との差が大きく異ならないことを確認し、必要に応じてパラメータの調整を実機で行う必要があった。しかし、それらの実機での調整は、動特性解析コードを用いたシミュレーションで行った全制御ルールのメンバーシップ関数により調整しようとすると、制御ルールが全部で49個あるため、極めて多くの時間と労力を要し、実機で行うことは、現実的に不可能である。そこで、動特性解析コードを用いたシミュレーションにより調整されたメンバーシップ関数は、そのまま採用し、重みゲインm1、m2及びm3のみを実機において調整する適用が可能か検討した。 ファジィ制御システムを含む給水制御系の制御モデルのブロック線図を図8.4.17に示す。また、「ふげん」の蒸気ドラムの単純化した水位モデルを図8.4.18に示す。 この制御系は、図8.4.17のように、水位制御ユニット(図中、点線で示す)、流量変化フィードバックユニット(図中、一点鎖線で示す)及び、原子炉出力変化フィードバックユニット(図中、二点鎖線で示す)からなる状態フィードバック回路と考えることができる。 式(10a〜10g)の状態から、重みゲインm2及び |
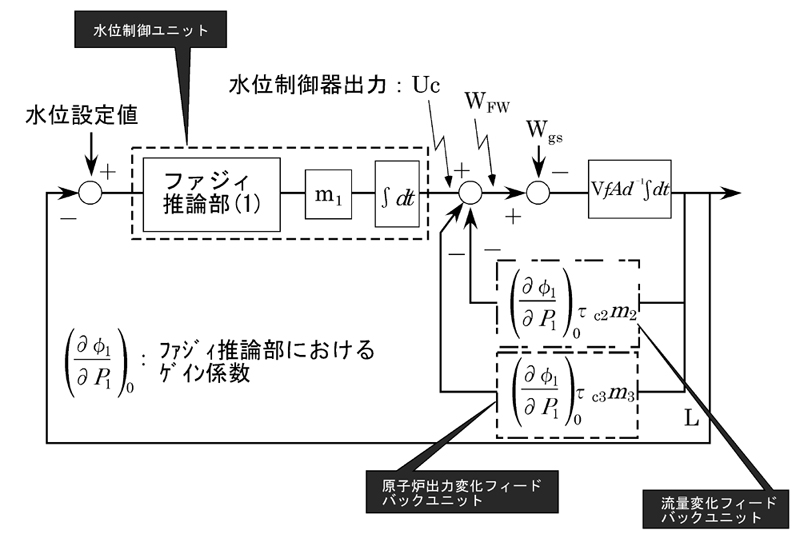 図8.4.17 給水制御系の制御モデルのブロック線図 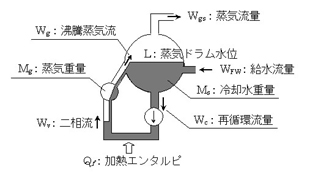 図8.4.18 蒸気ドラムの単純化した水位モデル m3を変えた時の制御特性の変化を検討した。式(10a)における要素マトリックスの特性値をλ1、λ2(<0)とした時、状態フィードバックに基づく拡張プラントは、式(11a)に示される輸送関数を持つことが分かる。 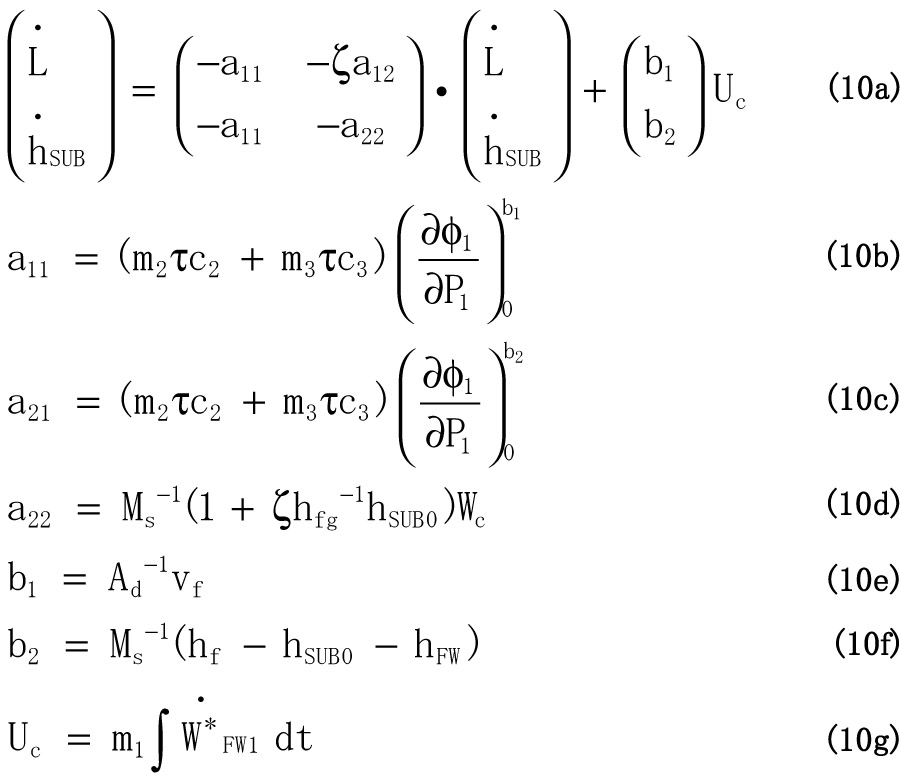 |
| 374 | ||