6
章
| 第6章 「ふげん」の運転実績 |
第 6 章 |
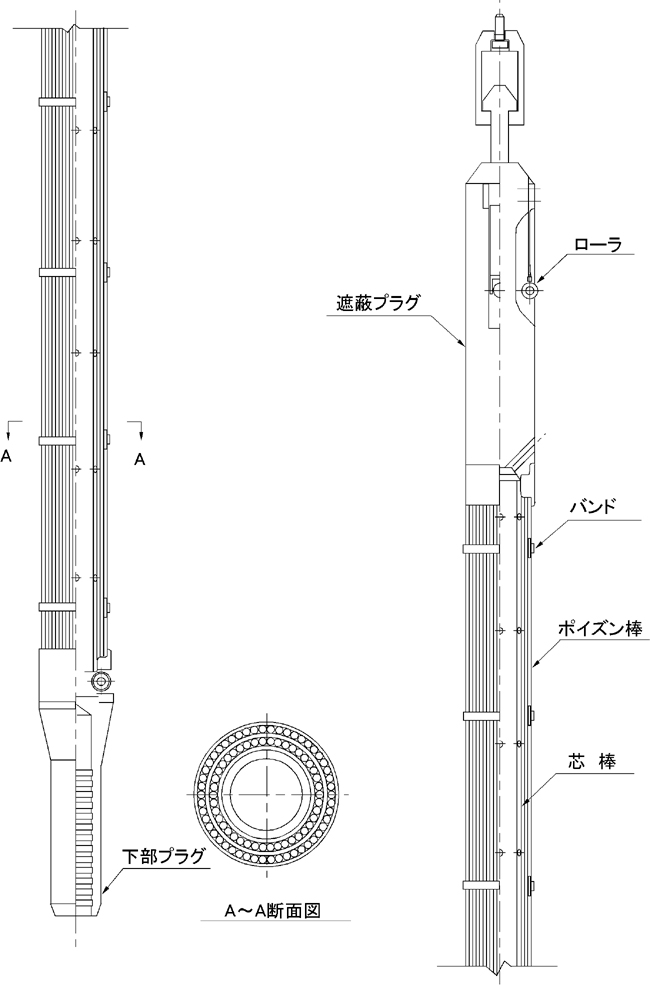 図6.2.8 制御棒概略構造図 表6.2.5 制御棒主要仕様 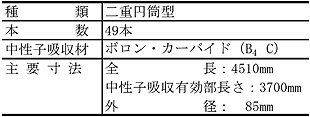 ( |
の特定位置を、リミットスイッチにより検出し、上限より下限までの任意位置を、制御棒位置検出器(差動トランス)で連続的に検出して、中央制御室の制御盤上に表示するものである。
( ワイヤロープの張力過大及び張力喪失は、リミットスイッチで検出し、中央制御室の制御盤上に表示するとともに、それぞれ制御棒の引抜、挿入をインターロックする。 ( スクラムのために電磁クラッチが切り離されると、巻胴は、制御棒の自重によるトルクで回転を始めるが、巻胴、これに関連する回転部の慣性モーメント及び摩擦抵抗により、その回転が妨げられる。この抵抗を打ち消すため、加減速機構の圧縮バネとボールナット及びボールスクリューの作用により、加減速機構軸に加速トルクを与える。また、ストロークの終端においては、ワイヤロープが余分に繰り出されないように、巻胴の回転を止める逆向きトルクを与える。 ( 制御棒駆動装置のケーシングは、上部及び下部ケーシングからなる。上部ケーシングは、電動機、電磁クラッチ、制御棒位置検出装置、加減速機構等、下部ケーシングは、巻胴、ワイヤロープ張力検出装置、ガイドプーリ等を収めている。この上下のケーシングを貫通する軸をメカニカルシールで軸封し、制御棒冷却用の重水の湿分による駆動装置の劣化、損傷を防いでいる。 制御棒駆動装置概要図を図6.2.9、制御棒駆動装置主要仕様を表6.2.6に示す。 (2)開発経緯7) 「ふげん」の制御棒駆動装置は、先行軽水炉と異なる独特の構造であり、動力炉・核燃料開発事業団(以下、「動燃」という)が独自に開発した。開発は、主要部品の開発試験及び機能確認試験から開始し、実機と同様の模擬装置を試作して駆動特性試験、スクラム特性試験等を行い、最終段階に耐久試験を行った。 耐久試験は、全ストローク上昇⇒全ストローク下降⇒全ストローク上昇⇒スクラムのサイクルを繰り返し、1,000サイクルごとにスクラム特性等のチェック、2,000サイクルごとに分解点検を行って、総計12,000サイクルの試験を実施した。6,000サイクル終了時の点検で、メカニカルシール部ベアリングと巻 |
| 200 | ||